NVIDIA十年AI布局,押注“物理AI”引领下一场机器人革命
2025-06-27
14:20:28
来源: 杜芹
点击
回顾 NVIDIA 过去十余年的 AI 布局,不难发现它始终走在浪尖上:十二年前,NVIDIA率先将GPU引入语音识别和图像识别领域,凭借CUDA与 TensorRT 等软件栈,奠定了深度学习训练与推理的硬件基石;近五年,生成式 AI 持续发力,NVIDIA 的多卡并行训练、混合精度加速和分布式系统设计,支撑起 ChatGPT 级别的文本对话和图像、视频生成工具,使“AI 会看、会写、会画、会播”成为日常。
当AI学会“看、写、画、播”之后,下一步是什么?NVIDIA给出的答案是“物理AI”——AI要懂得惯性、摩擦、碰撞等物理定律,并据此自主推理与决策。而机器人、自动驾驶车辆等自主系统,则是「物理AI」这一理念的最佳载体。黄仁勋认为,AI正从感知与生成迈入代理式AI(Agentic AI)与物理AI(Physical AI)的新阶段,物理AI是机器人革命的基石,机器人将是未来经济的核心。
但物理AI的实现,不是易事,物理AI需要AI学会“真实世界的规则”,在安全的环境里反复模拟和训练,而这正是NVIDIA近年来重点布局的方向。在此前的Computex大会上,NVIDIA CEO黄仁勋秀出了三大机器人“法宝”技术,开源机器人模型 Isaac GR00T N1.5、仿真与训练平台(Cosmos、Isaac Sim、Isaac Lab),以及支撑训练和部署的硬件底座Jetson AGX Thor,为机器人开发的每个环节提供核心技术支持,最终来赋能物理AI。
Isaac GR00T N1.5:开源通用的人形机器人模型
过去两年,人形机器人正从“炫技展示”迈向“场景落地”,逐步成为全球机器人技术演进的新焦点。特斯拉、波士顿动力、小米、优必选等公司频频发布样机,背后一个共同挑战是:如何让机器人不仅能动,还能“理解”“感知”“适应”?
NVIDIA 提出的解决方案是 Isaac GR00T——专为人形机器人研发打造的开发平台。它不仅具备机器人感知与控制所需的“智能核心”Isaac GR00T N开源基础模型,还结合了 NVIDIA Omniverse 与 Cosmos 构建的高精度模拟框架,能在虚拟世界中生成逼真的动作数据,用于大规模训练;最终,这些模型可部署到边缘计算平台 Jetson AGX Thor 上,驱动机器人在真实环境中流畅运行。
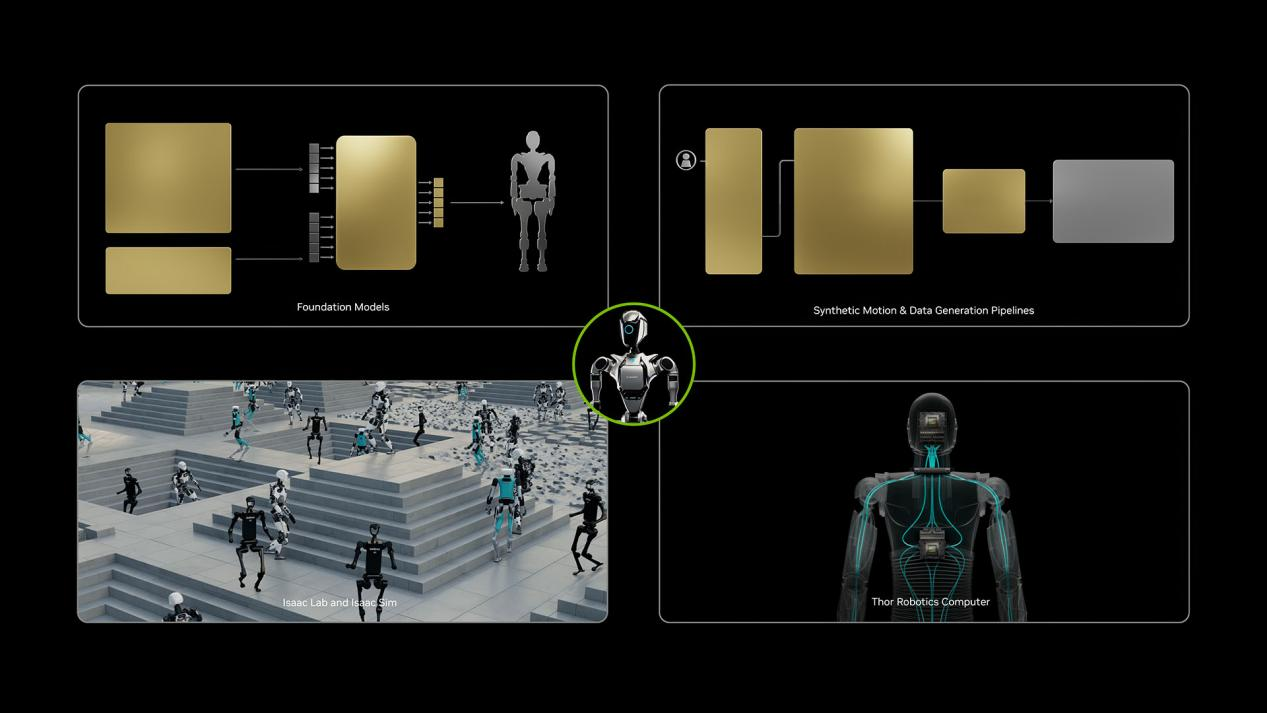
Isaac GR00T的工作原理(来源:NVIDIA,下同)
在实际落地中,国内厂商光轮智能已率先将 GR00T N1 模型部署至汽车制造产线。这是该基础模型在工业场景中的首次真实应用,不仅实现了人形机器人在复杂工厂环境下的自主作业,也依托合成数据训练技术,有效突破了传统训练数据获取难、成本高的问题。这标志着人形机器人不再只是概念验证,而是开始进入具身智能+ 智能制造的融合发展新阶段。
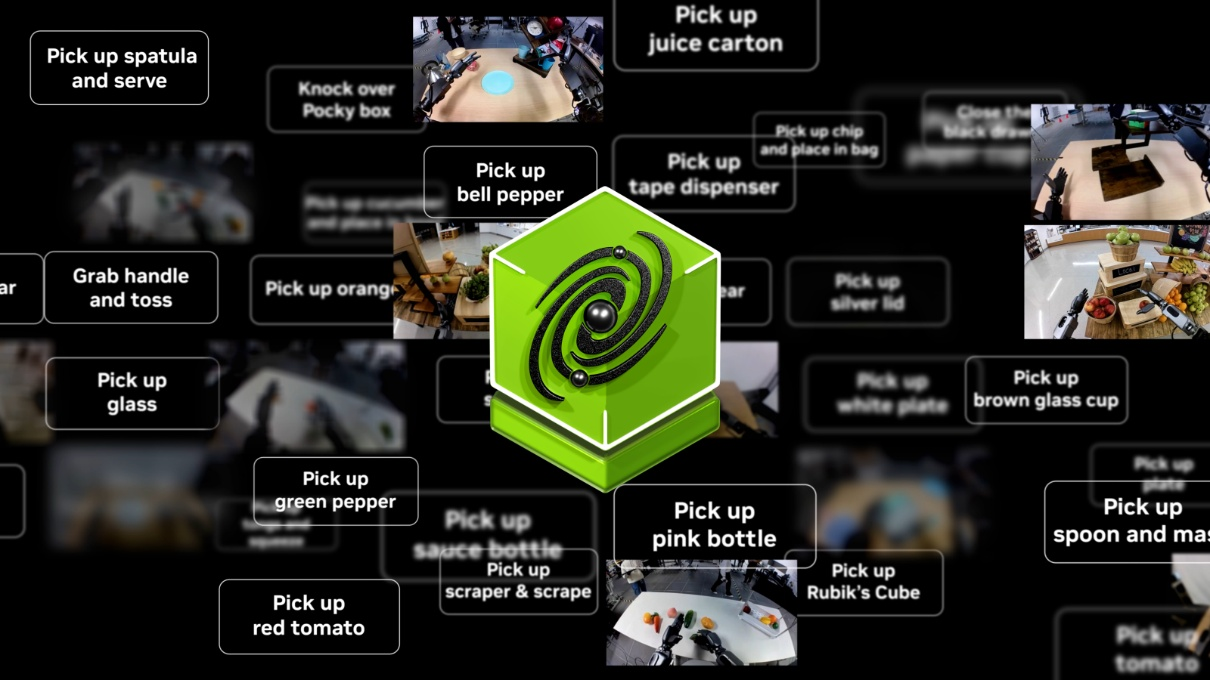
在今年的 Computex 上,NVIDIA 正式发布 GR00T N1模型的首次重大更新——Isaac GR00T N1.5。在工业物料分拣、存放等常见制造场景中,N1.5 展现出了更强的环境适应性和工作空间配置调整能力,并能基于自然语言指令识别并操作目标物体。
目前,AeiRobot、Foxlink、光轮智能与 NEURA Robotics 等企业已在其 ALICE4、工业机械臂与家庭自动化项目中率先采用这一模型,显著提升了抓取、放置与灵活作业的成功率与效率。NVIDIA的这一开源策略不仅降低了入门门槛,也为上下游整机厂商与二次开发者提供了统一的底层架构,使得同一套模型能够在不同场景中高效复用,避免了重复开发带来的成本浪费。
此外,包括 Agility Robotics、波士顿动力、傅利叶、Foxlink、银河通用、Mentee Robotics、NEURA Robotics、General Robotics、Skild AI 和小鹏机器人在内的多家人形机器人和机器人开发商,正采用 NVIDIA Isaac平台技术推动人形机器人的开发与部署。
Isaac GR00T-Dreams Blueprint:AI的“数据工厂”
无论是识图识物,还是操作行为,AI的学习都离不开数据。但在机器人训练中,真实世界的数据不仅难采集,而且成本高、风险大。
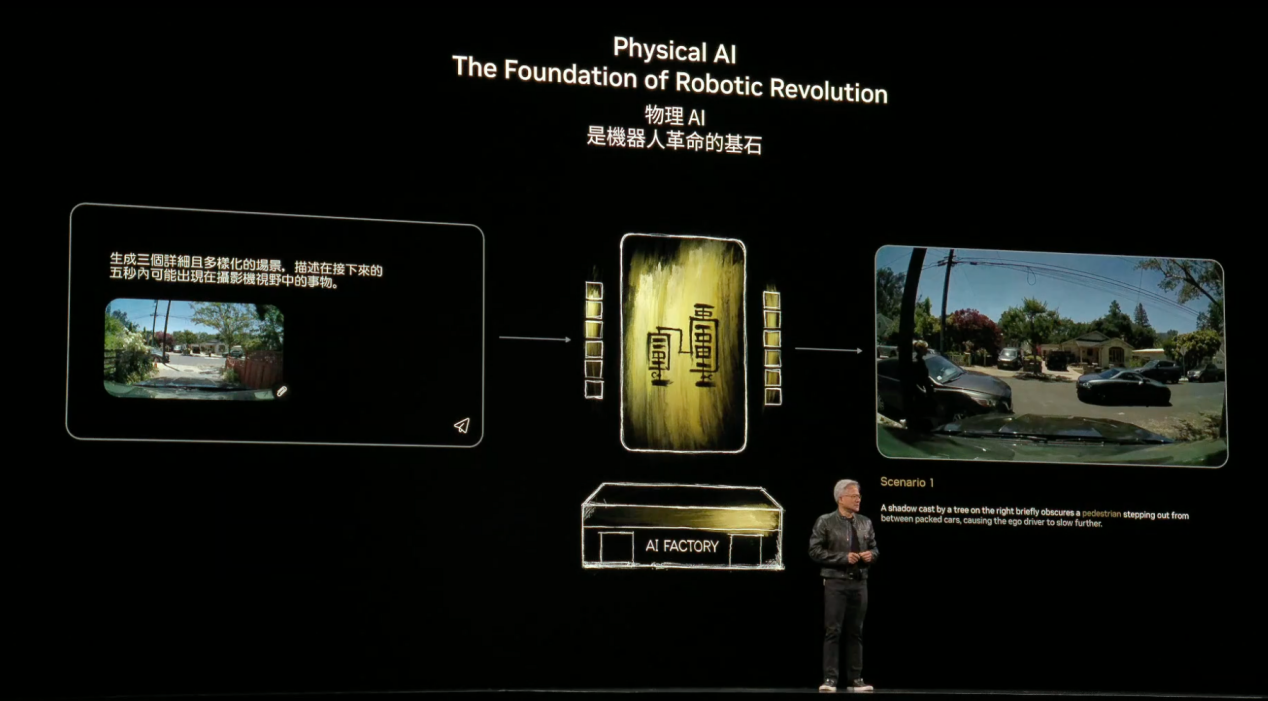
为此,NVIDIA进一步推出了NVIDIA Isaac GR00T-Dreams Blueprint。这套系统可以只依靠一张环境图像,通过 NVIDIA Cosmos 平台,合成机器人在该环境中执行任务的视频。随后,它会从视频中提取关键的“动作 token”,作为训练数据输入模型,让机器人学习如何在不同场景下完成具体操作。
相比传统方式,这种合成数据生成思路不仅成本低、效率高,而且安全、可控。更重要的是,它还能与年初发布的 GR00T-Mimic Blueprint联动,GR00T-Mimic 使用 NVIDIA Omniverse和NVIDIA Cosmos平台增强现有数据,而GR00T-Dreams则使用Cosmos生成全新数据,极大丰富训练数据集。借助Cosmos Predict 2 和 Cosmos Reason WFM 等世界基础模型与思维链推理技术,合成数据的精度与多样性进一步提升,模型幻觉现象显著减少。
GR00T-Dreams Blueprint生成数据,用于训练人形机器人的推理和行为。
为配合GR00T-Dreams Blueprint数据生成流程,NVIDIA进一步推出了 Replicator 扩展程序,可用于生成仿真图像与视频数据,涵盖3D角色模拟(如走路、坐下、举重等)、物体检测、事件触发(如掉落、火灾)和图像字幕对(Caption Extension),这些都为多模态学习和视觉语言模型训练奠定了基础。
NVIDIA 研究院正是借助 GR00T-Dreams Blueprint 生成的合成训练数据,仅用 36 小时就完成了 GR00T N1.5 模型的迭代开发(基于 GR00T N1 更新)。相比之下,如果采用传统的人工数据收集方式,这一过程可能需要耗费近三个月的时间,效率提升了惊人的数十倍!
Isaac Sim与Isaac Lab:机器人仿真的“主战场”
有了数据,下一步就是仿真训练。在这方面,NVIDIA 几乎搭建了一个机器人专属的“虚拟宇宙”:
l NVIDIA Isaac Sim 5.0:机器人仿真与合成数据生成框架,即将在 GitHub 上以开源形式提供。这一版本在开放性、可扩展性和SDG(合成数据生成)方面大幅提升,支持 Software-in-the-Loop 测试,并集成了MobilityGen等模块,可生成真实世界运动动力学的高质量数据,用于训练更智能、更适应现实环境的机器人导航模型。
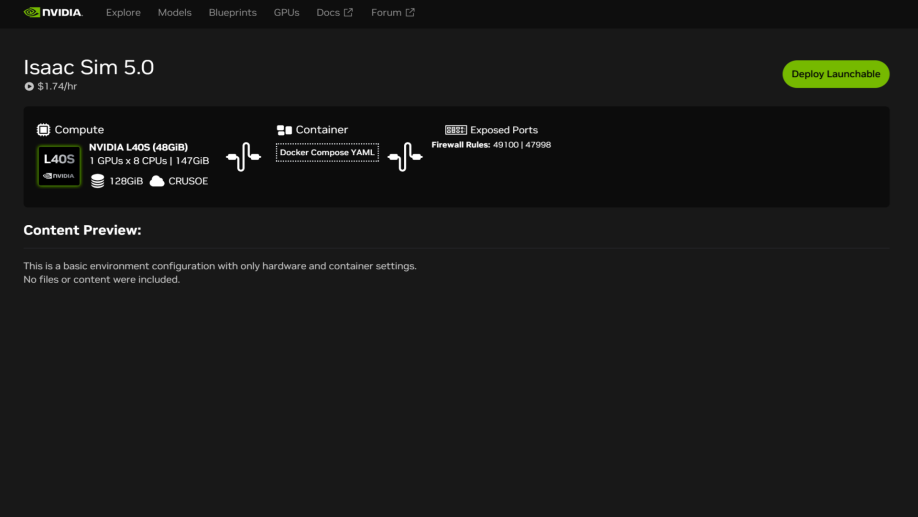
Isaac Sim Brev 窗口
l NVIDIA Isaac Lab 2.2:一个开源机器人学习框架,推出了更多基准测试脚本、吸盘建模优化和 LeRobot 数据格式支持,使 GR00T N 模型的训练流程更加高效。诸如 Fourier GR1 机器人在复杂场景下的双臂操作训练,即基于 Isaac Lab 所集成的环境和数据采集能力完成。
l NVIDIA Cosmos Reason:全新世界基础模型(WFM),运用思维链推理技术,为物理 AI 模型训练生成准确、高质量的合成数据,现已在 Hugging Face 平台开放。
l Cosmos Predict 2:用于 GR00T-Dreams,即将登陆 Hugging Face。有助于显著提升虚拟世界生成质量,减少模型幻觉现象。
l NVIDIA Isaac GR00T-Mimic Blueprint:仅需少量人类示范动作,即可生成指数级规模的机器人操作合成运动轨迹。
l 开源物理 AI 数据集:包含用于开发 GR00T N 模型的 24,000 条高质量人形机器人运动轨迹数据。
Jetson Thor:重塑人形机器人智能核心
人形机器人在特定环境中需要具备自主感知、规划与执行任务的能力,这要求机器人能够实时处理大量的数据。为了满足这一需求,安装在机器人本体上的实时计算平台必须具备高性能计算能力,同时还要满足功耗和空间的限制。
NVIDIA Jetson 系列正是为此类边缘计算场景研发的嵌入式系统模块。它的核心设计理念是将强大的 AI 运算能力集成到紧凑型硬件中,使得机器人能够在本地直接运行深度学习模型和复杂的 AI 算法,从而实现离线智能决策。这种本地化的数据处理优势使 Jetson 系列在实时响应速度(典型延迟低于 30 毫秒)和隐私保护方面相比依赖云端计算的方案具有明显的优势。
为了满足各种自主应用的需求,NVIDIA不断推出Jetson系列的更新产品。比如2018年推出的Jetson Xavier,性能最高达32 TOPS,是当时性能最强的嵌入式 AI 计算平台,为未来的技术发展奠定了基础。2022年推出的Jetson Orin,性能最高可达275 TOPS,几乎是 Xavier 的 10 倍,支持复杂的 AI 工作负载,实现了更高级的实时感知和机器人功能。
即将推出的 Jetson AGX Thor 标志着人形机器人计算能力的重大突破。该平台基于 NVIDIA Blackwell 架构,搭载带 Transformer引擎的下一代 GPU,提供高达 800 TFLOPS(8 位浮点运算)的 AI 性能,支持 GR00T 等多模态生成式 AI 模型。Jetson Thor 采用模块化架构,优化性能、功耗和尺寸,集成功能安全处理器、高性能 CPU 集群及 100GB 以太网带宽,显著简化系统设计与集成。
Jetson Thor的推出意味着人形机器人将在计算能力和自主决策方面取得质的飞跃,为人工智能与机器人技术的融合带来新机遇。借助其强大的本地计算能力,未来的机器人将能够更快速、更准确地进行自主决策,并更好地与人类及其他机器协作。
总结
NVIDIA 正在用其覆盖“芯片→系统→软件→仿真→模型”全栈技术,打造一个面向物理 AI 的端到端生态。从 Isaac GR00T N1.5 的开源基础模型,到 Dreams Blueprint 的合成数据,再到 Blackwell 的超算与 Jetson 的边缘推理,辅以 Isaac Sim 5.0 和 Lab 2.2 的持续升级,NVIDIA 以“云—仿真—硬件”三大平台协同发力,正引领一场机器人智能化的深度变革。未来,伴随跨模态理解、多场景自适应以及更高安全保障的持续突破,物理 AI 将真正从实验室走进千家万户,成为下一个改变人类生产与生活方式的里程碑。这场由NVIDIA引领的“物理AI”浪潮,正加速将科幻变为现实。
责任编辑:admin
相关文章
-

- 半导体行业观察
-

- 摩尔芯闻
最新新闻
热门文章 本日 七天 本月
热门评论
©2025 半导体行业观察
Copyright©2023 芯算智能科技(扬州)有限公司
苏ICP备2025200240号-2 皖公网安备 34019202000656号