具身智能爆发前夜,英特尔的价值坐标何在?
2026-01-27
13:20:28
来源: 杜芹
点击
从 CES 2026 的热潮到多模态模型的狂飙,具身智能正在从科幻走向产业,但它也正在经历一次典型的“概念错位”——很多人以为把模型塞进机器人就够了。但英特尔研究院副总裁、英特尔中国研究院院长宋继强在近日的一次技术分享会上谈到:真正的拐点不在于会不会说,而在于能不能稳定地执行、持续地工作、出错时还能体面地收场。
具身智能究竟需要怎样的计算架构?在神经网络的幻觉与环境不确定性面前,如何把物理安全变成可设计、可验证、可兜底的能力?围绕这些关键问题,我们与宋继强展开了一场深度对话。
具身智能要落地,为什么异构计算绕不开?
“如果只是播放视频、生成语音、处理文档,这些都不叫具身智能”。宋继强指出,具身智能必须满足三件事:有物理实体能感知外界,能理解环境并做出决策,最关键是能通过执行器改变物理世界(搬运、抓取、移动、操控),并把改变反馈回感知与决策,形成闭环。
无论是无人机运送物资,还是机器人在工厂操控,只有具备这种“改变世界并持续闭环”的能力,才能被称为具身智能。而这种复杂的实时交互,对底层计算能力提出了极高的异构化要求。
问题在于,感知→理解/决策→执行→再观察这条链路上的每一段对算力形态的要求并不一致:感知侧可能需要高吞吐(多路相机、雷达、力觉等),决策侧既要“聪明”(泛化、推理),又要“稳”(可解释、可验证),执行侧拼的是确定性与实时性(控制频率、抖动、时延上界),工业、商用、消费场景在功耗、体积、温宽、可靠性、传感器精度上差异巨大。
于是很难用一种硬件吃下所有负载,底层更可能走向CPU/GPU/NPU/加速器组合的异构形态。哪怕你已经有 CPU/GPU/NPU,也不意味着“同一种 GPU 设计”能在功耗与性能上都做到最好;进一步拆分,你甚至会按负载用不同级别的 CPU、不同级别的 GPU 来做能效优化。

宋继强把今天的业务构建方式概括为一次范式迁移:越来越多的业务不再依赖预编程、预置功能库与固定框架,而会通过多智能体方式,根据用户要求、业务流变化、场景变化去自主构成业务流,并利用生成能力生成/组装智能体来完成需求。也就是说,具身设备将越来越像一个“可装配的能力容器”。你往上装什么智能体,它就表现成什么业务形态。
但这也把系统挑战推到台前——准确性、可靠性、安全性、可扩展性、成本结构与响应速度,都不再是 Demo 层面的“好不好看”,而是生产力系统的“能不能用、敢不敢用”。
一个智能体看似是“输入—决策—执行”的整体单元,但拆开看,它往往是多类 AI 组件的拼装体:可能有扩散模型、可能有多智能体交互机制、可能有大模型推理时 prefill/decode 的不同算力需求,还夹杂大量数据预处理、后处理与媒体处理。
这些任务的 kernel 形态、数据规模、并行度千差万别。即便你已经拥有 CPU/GPU/NPU,也不意味着“同一种 GPU 设计”能在所有负载上同时做到最佳功耗与性能。异构的意义,是把不同负载送到更合适的计算单元上,以更好的能效比完成同一条业务链路。
系统2/系统1/系统0:异构不是口号,是可映射的链路
在具身机器人上,业界目前并没有统一最优解。理想当然是端到端 VLA:视觉、语言输入后直接输出动作,并且动作高频、高精度、可控可证。但现实是,多路线混合探索,没有一种方法能覆盖所有精度与准确度要求,VLA 也不是万能钥匙。
宋继强给出的解释框架很清晰——把链路分成三套“系统”:
系统 2(慢系统):逻辑与理解。主要任务是运行多模态大模型(VLM/VLA),处理高通量视觉输入,理解语义并进行任务规划。硬件匹配GPU,GPU擅长并行计算,能够应对大模型的高吞吐量需求。
系统 1(中枢):动作专家(Action Expert)。其任务是将上层规划映射到具体的执行器(关节、轮子),输出频率约 200Hz。硬件匹配是NPU。如英特尔酷睿 Ultra 内置的 NPU,在低功耗下提供极强的矩阵运算能力,兼顾实时性与能效比。
系统 0(快系统):硬实时控制。传统的MPC 控制器,需达到 1000Hz 级别的频率,确保动作的丝滑与精确。硬件匹配擅长高精度浮点运算与快速响应,处理高频确定性任务的CPU。
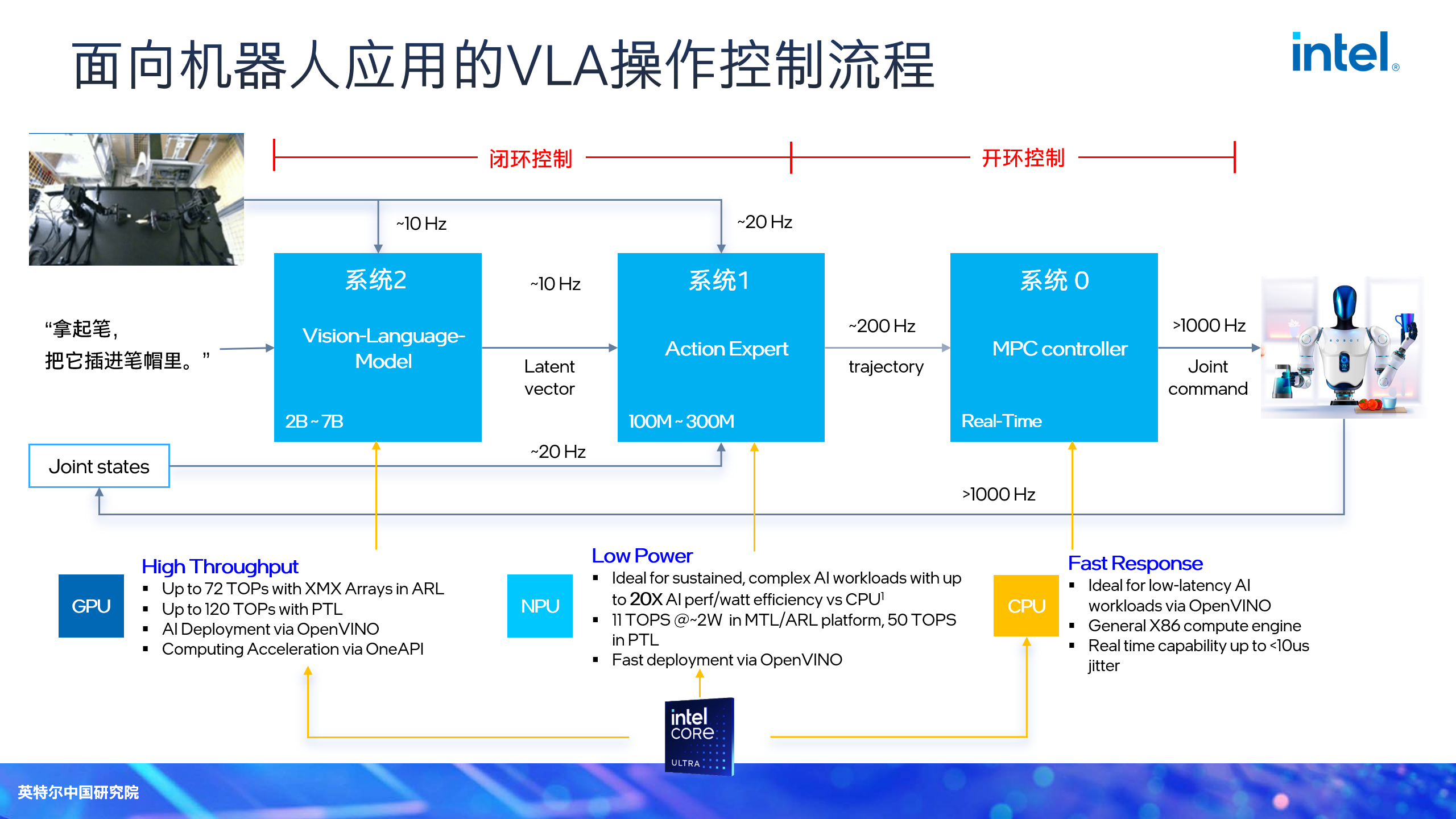
异构组合能以更好的能效比解决问题。我们不仅需要 CPU、GPU、NPU,甚至需要不同规格的内核来处理不同负载,通过软件基础设施(如 OpenVINO)隔离硬件多样性,实现软件定义的灵活性。
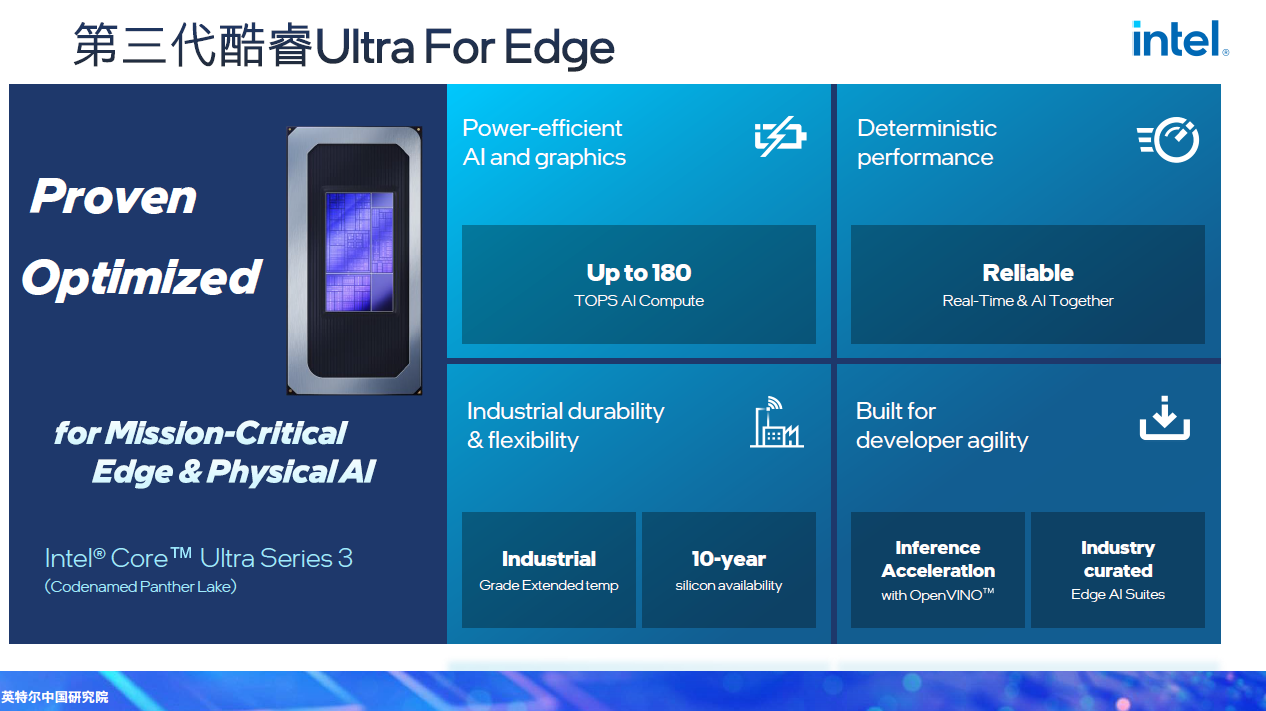
在CES上发布的第三代酷睿 Ultra For Edge,正是英特尔针对这一愿景交出的答卷。相比消费级版本,它增强了温宽、耐用性及 10 年可靠性,支持高实时性与高确定性精度。具备工业级硬核。采用 Intel 18A 制程,XPU 架构算力可达 180 TOPS。通过英特尔机器人 AI 套件,支持大语言模型(LLM)驱动的任务规划,正式将 EtherCAT 支持纳入软件堆栈,补齐了从感知到实时控制的最后一块拼图。
关于“机器人是否需要专门芯片、何时推出”,宋继强给了一个条件性判断:现在机器人多用手机/汽车/PC 芯片改造适配,因为产业规模还不够支撑专用芯片的商业闭环。此外,机器人负载与技术路线尚未定型,究竟围绕 VLA 优化,还是世界模型成为主轴,业界尚无定论。做ASIC本身不难,如果系统级规格明确的话,约 10 个月可完成设计流片,18 个月左右完成测试。最难的是先把系统级规格定下来,除了跑模型,还要明确业务跑起来需要哪些系统能力。
这也解释了英特尔的“机会在哪里”:它并不押注某一个大模型路线,而强调自身在工业机器人底层能力上的长期积累——运动控制、高精度浮点计算、逆运动学、工业控制板与视觉库等。上层路线可能变,但工业级可部署的底层约束长期存在。
但异构带来另一个关键命题:软件如何在硬件多样性之上保持长期有效?宋继强强调,中间需要“系统基础设施”去隔离底层硬件差异,让上层业务编程的投入不因供应商变化而作废;上层需要相对稳定的接口,底层可以灵活演进——这也是为什么产业界越来越重视 OpenVINO 等工具链与面向边缘/机器人场景的软件栈建设。
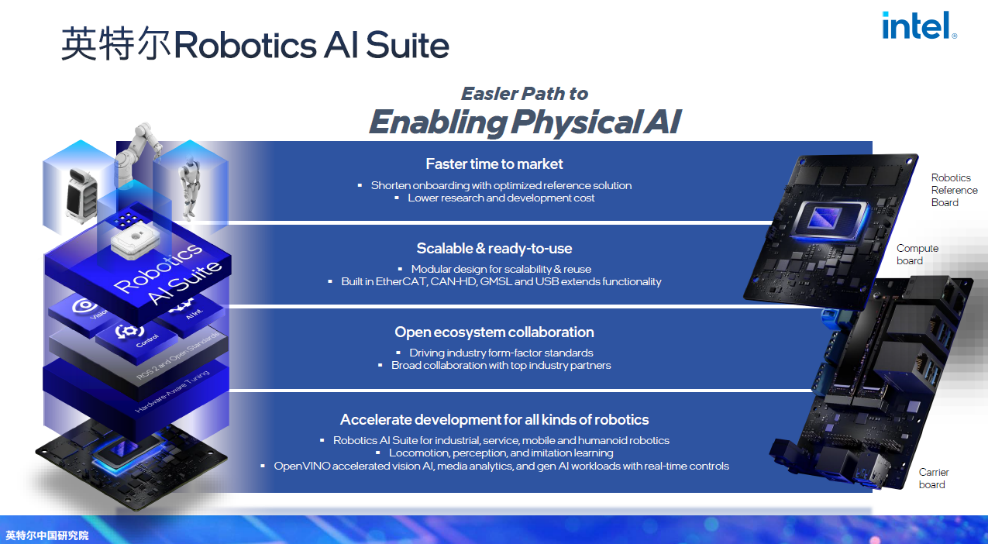
英特尔机器人AI套件在去年年中发布,每个季度都会升级。套件包含机器人领域常用的软件包。此外,英特尔的具身智能 SDK新增了对大语言模型的支持,把EtherCAT支持正式纳入软件堆栈,并在实时库支持方面补齐。
可信赖性:守住具身智能的“安全下限”
当基于统计学的神经网络(如 VLA 模型)进入物理世界,“幻觉”可能导致灾难。宋继强提出了具身智能可信赖性的三个层级:决策可信、执行可信、系统出错后依然可靠。
宋继强推荐混合模式控制,利用大模型的泛化能力提升“上限”,同时通过神经符号 AI(Neural-Symbolic AI),注入规则与知识嵌入,用来检测神经网络的输出。上限靠模型提升,下限靠规则保障。必须确保机器人不会因为一次幻觉而产生不可接受的后果。
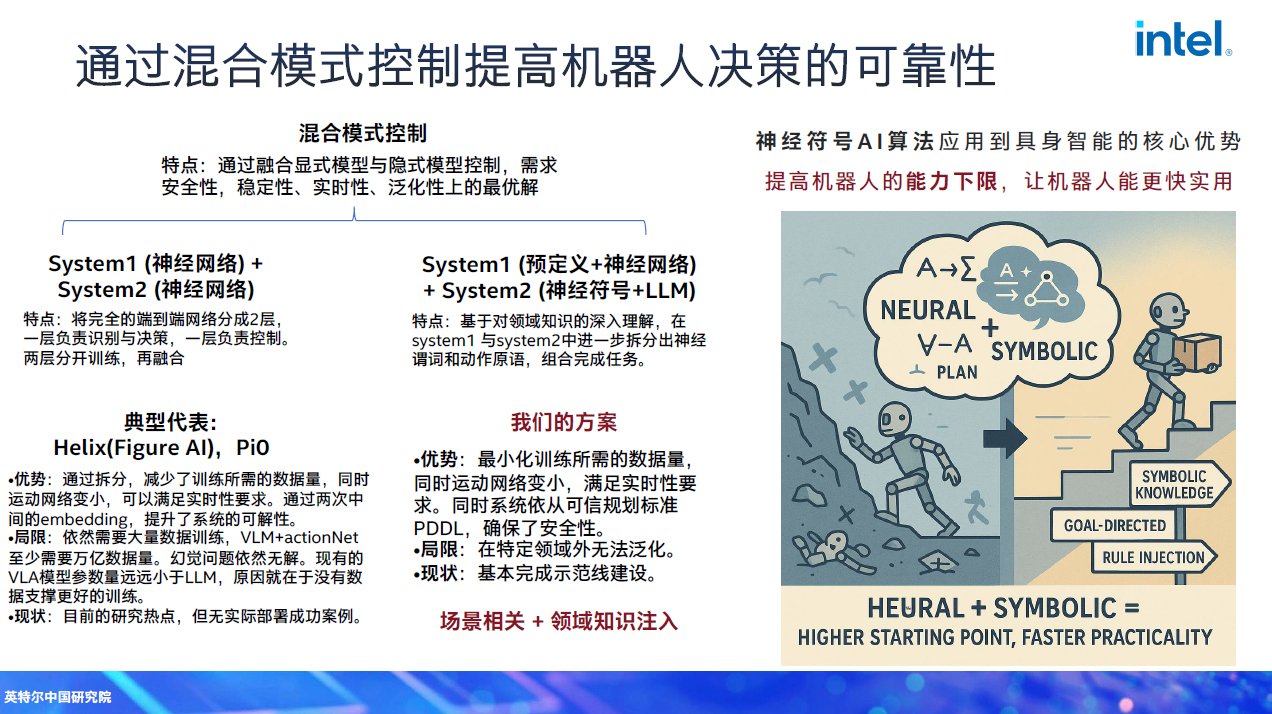
例如,把复杂任务拆成可验证的步骤单元:每一步输入输出确定,可执行、可检测、可拼接。比如“喝水”可以拆成拿到瓶子—拿起—开盖—举起—喝—放下等 6~7 步,每一步都对应一个动作原语。执行过程中不需要频繁打断:给它一个原语让它完成,完成后再检查是否达标,再进入下一步。关键点在于:原语怎么拆通常由领域专家定义,但原语之间的推理组合是自动的;原语内部的检测与执行也可以自动化。这恰恰是“可信赖性工程化”的一种路径:把不可控的连续动作,拆成可验收的离散里程碑。
除了决策层,物理环境的突发状况(如地面打滑、电机故障)也防不胜防。为此,英特尔提出了 PMDF 解决框架:
l 安全子系统:独立于主系统,代码完全可靠,持续监控传感器与执行器状态。
l Fallback(备用系统):当危险发生,系统不应“直接瘫痪”,而是实现类似汽车“慢速靠边”的优雅降级。例如,引导机器人在摔倒时避开人群,或卡死特定关节以减小损伤。
标准缺位带来的现实后果
既然自动驾驶有 L1 到 L5,机器人能不能也分级递进?宋继强的判断是:目前还没看到像 L1-L5 那样严格的标准来划分具身机器人的能力。
其原因的原因也很现实:自动驾驶一旦上路,安全要求必须“最高”;而当下很多服务机器人、智能机器人更多停留在跳舞、展示、演示阶段,大家关注“它能做什么”,对“工业级可靠性”还没有形成同等强度的社会与监管共识。
但标准缺位不代表问题不存在。相反,现实问题会更尖锐:当机器人 30% 的时候表现不好怎么办?怎么检测它、管控它?这也是宋继强强调“最好尽早形成可靠性框架”的原因:即便技术原型暂时不完善,也应该先有框架,后续逐步补齐,而不是等事故和舆论把行业逼到墙角。
为此,英特尔联合学界及产业界的合作伙伴发布了《具身智能机器人安全子系统白皮书》,从系统架构层面提出了一个安全子系统的设计框架,旨在为机器人系统提供全方位、多层次的安全保障。

结语
如果把今天的具身智能热潮做一个冷静的归纳:行业在拼命抬高能力上限,但能否落地,取决于能否把能力下限守住——守住幻觉、守住误差、守住不确定环境下的物理风险,守住长期运行的可靠性与一致性。
当下许多厂商都是从大模型“向下渗透”,英特尔选择以工业级的严谨“向上赋能”。当行业重心转移到执行层面,英特尔在底层运控上的积淀便凸显出不可替代的价值。从CPU核的精细分配到I/O的实时调度,从虚拟化隔离到关键任务的Fallback机制,英特尔正在为智能机器筑起一道安全堤坝。
一句话:上层智能能力可以慢一点,但底层动作必须准、必须稳、必须可验收。在工业与关键任务里,这一层的可信赖执行往往比能做更多花活更重要。世界上没有通往复杂场景的万能钥匙,唯一的路径是让创新技术在成熟的工程体系中落地生根。
具身智能究竟需要怎样的计算架构?在神经网络的幻觉与环境不确定性面前,如何把物理安全变成可设计、可验证、可兜底的能力?围绕这些关键问题,我们与宋继强展开了一场深度对话。
具身智能要落地,为什么异构计算绕不开?
“如果只是播放视频、生成语音、处理文档,这些都不叫具身智能”。宋继强指出,具身智能必须满足三件事:有物理实体能感知外界,能理解环境并做出决策,最关键是能通过执行器改变物理世界(搬运、抓取、移动、操控),并把改变反馈回感知与决策,形成闭环。
无论是无人机运送物资,还是机器人在工厂操控,只有具备这种“改变世界并持续闭环”的能力,才能被称为具身智能。而这种复杂的实时交互,对底层计算能力提出了极高的异构化要求。
问题在于,感知→理解/决策→执行→再观察这条链路上的每一段对算力形态的要求并不一致:感知侧可能需要高吞吐(多路相机、雷达、力觉等),决策侧既要“聪明”(泛化、推理),又要“稳”(可解释、可验证),执行侧拼的是确定性与实时性(控制频率、抖动、时延上界),工业、商用、消费场景在功耗、体积、温宽、可靠性、传感器精度上差异巨大。
于是很难用一种硬件吃下所有负载,底层更可能走向CPU/GPU/NPU/加速器组合的异构形态。哪怕你已经有 CPU/GPU/NPU,也不意味着“同一种 GPU 设计”能在功耗与性能上都做到最好;进一步拆分,你甚至会按负载用不同级别的 CPU、不同级别的 GPU 来做能效优化。
宋继强把今天的业务构建方式概括为一次范式迁移:越来越多的业务不再依赖预编程、预置功能库与固定框架,而会通过多智能体方式,根据用户要求、业务流变化、场景变化去自主构成业务流,并利用生成能力生成/组装智能体来完成需求。也就是说,具身设备将越来越像一个“可装配的能力容器”。你往上装什么智能体,它就表现成什么业务形态。
但这也把系统挑战推到台前——准确性、可靠性、安全性、可扩展性、成本结构与响应速度,都不再是 Demo 层面的“好不好看”,而是生产力系统的“能不能用、敢不敢用”。
一个智能体看似是“输入—决策—执行”的整体单元,但拆开看,它往往是多类 AI 组件的拼装体:可能有扩散模型、可能有多智能体交互机制、可能有大模型推理时 prefill/decode 的不同算力需求,还夹杂大量数据预处理、后处理与媒体处理。
这些任务的 kernel 形态、数据规模、并行度千差万别。即便你已经拥有 CPU/GPU/NPU,也不意味着“同一种 GPU 设计”能在所有负载上同时做到最佳功耗与性能。异构的意义,是把不同负载送到更合适的计算单元上,以更好的能效比完成同一条业务链路。
系统2/系统1/系统0:异构不是口号,是可映射的链路
在具身机器人上,业界目前并没有统一最优解。理想当然是端到端 VLA:视觉、语言输入后直接输出动作,并且动作高频、高精度、可控可证。但现实是,多路线混合探索,没有一种方法能覆盖所有精度与准确度要求,VLA 也不是万能钥匙。
宋继强给出的解释框架很清晰——把链路分成三套“系统”:
系统 2(慢系统):逻辑与理解。主要任务是运行多模态大模型(VLM/VLA),处理高通量视觉输入,理解语义并进行任务规划。硬件匹配GPU,GPU擅长并行计算,能够应对大模型的高吞吐量需求。
系统 1(中枢):动作专家(Action Expert)。其任务是将上层规划映射到具体的执行器(关节、轮子),输出频率约 200Hz。硬件匹配是NPU。如英特尔酷睿 Ultra 内置的 NPU,在低功耗下提供极强的矩阵运算能力,兼顾实时性与能效比。
系统 0(快系统):硬实时控制。传统的MPC 控制器,需达到 1000Hz 级别的频率,确保动作的丝滑与精确。硬件匹配擅长高精度浮点运算与快速响应,处理高频确定性任务的CPU。
异构组合能以更好的能效比解决问题。我们不仅需要 CPU、GPU、NPU,甚至需要不同规格的内核来处理不同负载,通过软件基础设施(如 OpenVINO)隔离硬件多样性,实现软件定义的灵活性。
在CES上发布的第三代酷睿 Ultra For Edge,正是英特尔针对这一愿景交出的答卷。相比消费级版本,它增强了温宽、耐用性及 10 年可靠性,支持高实时性与高确定性精度。具备工业级硬核。采用 Intel 18A 制程,XPU 架构算力可达 180 TOPS。通过英特尔机器人 AI 套件,支持大语言模型(LLM)驱动的任务规划,正式将 EtherCAT 支持纳入软件堆栈,补齐了从感知到实时控制的最后一块拼图。
关于“机器人是否需要专门芯片、何时推出”,宋继强给了一个条件性判断:现在机器人多用手机/汽车/PC 芯片改造适配,因为产业规模还不够支撑专用芯片的商业闭环。此外,机器人负载与技术路线尚未定型,究竟围绕 VLA 优化,还是世界模型成为主轴,业界尚无定论。做ASIC本身不难,如果系统级规格明确的话,约 10 个月可完成设计流片,18 个月左右完成测试。最难的是先把系统级规格定下来,除了跑模型,还要明确业务跑起来需要哪些系统能力。
这也解释了英特尔的“机会在哪里”:它并不押注某一个大模型路线,而强调自身在工业机器人底层能力上的长期积累——运动控制、高精度浮点计算、逆运动学、工业控制板与视觉库等。上层路线可能变,但工业级可部署的底层约束长期存在。
但异构带来另一个关键命题:软件如何在硬件多样性之上保持长期有效?宋继强强调,中间需要“系统基础设施”去隔离底层硬件差异,让上层业务编程的投入不因供应商变化而作废;上层需要相对稳定的接口,底层可以灵活演进——这也是为什么产业界越来越重视 OpenVINO 等工具链与面向边缘/机器人场景的软件栈建设。
英特尔机器人AI套件在去年年中发布,每个季度都会升级。套件包含机器人领域常用的软件包。此外,英特尔的具身智能 SDK新增了对大语言模型的支持,把EtherCAT支持正式纳入软件堆栈,并在实时库支持方面补齐。
可信赖性:守住具身智能的“安全下限”
当基于统计学的神经网络(如 VLA 模型)进入物理世界,“幻觉”可能导致灾难。宋继强提出了具身智能可信赖性的三个层级:决策可信、执行可信、系统出错后依然可靠。
宋继强推荐混合模式控制,利用大模型的泛化能力提升“上限”,同时通过神经符号 AI(Neural-Symbolic AI),注入规则与知识嵌入,用来检测神经网络的输出。上限靠模型提升,下限靠规则保障。必须确保机器人不会因为一次幻觉而产生不可接受的后果。
例如,把复杂任务拆成可验证的步骤单元:每一步输入输出确定,可执行、可检测、可拼接。比如“喝水”可以拆成拿到瓶子—拿起—开盖—举起—喝—放下等 6~7 步,每一步都对应一个动作原语。执行过程中不需要频繁打断:给它一个原语让它完成,完成后再检查是否达标,再进入下一步。关键点在于:原语怎么拆通常由领域专家定义,但原语之间的推理组合是自动的;原语内部的检测与执行也可以自动化。这恰恰是“可信赖性工程化”的一种路径:把不可控的连续动作,拆成可验收的离散里程碑。
除了决策层,物理环境的突发状况(如地面打滑、电机故障)也防不胜防。为此,英特尔提出了 PMDF 解决框架:
l 安全子系统:独立于主系统,代码完全可靠,持续监控传感器与执行器状态。
l Fallback(备用系统):当危险发生,系统不应“直接瘫痪”,而是实现类似汽车“慢速靠边”的优雅降级。例如,引导机器人在摔倒时避开人群,或卡死特定关节以减小损伤。
标准缺位带来的现实后果
既然自动驾驶有 L1 到 L5,机器人能不能也分级递进?宋继强的判断是:目前还没看到像 L1-L5 那样严格的标准来划分具身机器人的能力。
其原因的原因也很现实:自动驾驶一旦上路,安全要求必须“最高”;而当下很多服务机器人、智能机器人更多停留在跳舞、展示、演示阶段,大家关注“它能做什么”,对“工业级可靠性”还没有形成同等强度的社会与监管共识。
但标准缺位不代表问题不存在。相反,现实问题会更尖锐:当机器人 30% 的时候表现不好怎么办?怎么检测它、管控它?这也是宋继强强调“最好尽早形成可靠性框架”的原因:即便技术原型暂时不完善,也应该先有框架,后续逐步补齐,而不是等事故和舆论把行业逼到墙角。
为此,英特尔联合学界及产业界的合作伙伴发布了《具身智能机器人安全子系统白皮书》,从系统架构层面提出了一个安全子系统的设计框架,旨在为机器人系统提供全方位、多层次的安全保障。
结语
如果把今天的具身智能热潮做一个冷静的归纳:行业在拼命抬高能力上限,但能否落地,取决于能否把能力下限守住——守住幻觉、守住误差、守住不确定环境下的物理风险,守住长期运行的可靠性与一致性。
当下许多厂商都是从大模型“向下渗透”,英特尔选择以工业级的严谨“向上赋能”。当行业重心转移到执行层面,英特尔在底层运控上的积淀便凸显出不可替代的价值。从CPU核的精细分配到I/O的实时调度,从虚拟化隔离到关键任务的Fallback机制,英特尔正在为智能机器筑起一道安全堤坝。
一句话:上层智能能力可以慢一点,但底层动作必须准、必须稳、必须可验收。在工业与关键任务里,这一层的可信赖执行往往比能做更多花活更重要。世界上没有通往复杂场景的万能钥匙,唯一的路径是让创新技术在成熟的工程体系中落地生根。
责任编辑:duqin
相关文章
-

- 半导体行业观察
-

- 摩尔芯闻
最新新闻
热门文章 本日 七天 本月
热门评论
©2025 半导体行业观察
Copyright©2023 芯算智能科技(扬州)有限公司
苏ICP备2025200240号-2 皖公网安备 34019202000656号